Programator
Wstęp
Dawno temu kiedy komputery posiadały jeszcze [[wp>Parallel_port|pory równoległe]] programowanie układów AVR wymagało jedynie kilku rezystorów. Dzisiaj w erze laptopów konieczne jest zbudowanie dodatkowego urządzenia pośredniczącego: programatora. Zadaniem urządzenia jest wysyłanie komend do układu docelowego w celu wykorzystania wbudowanego modułu [[wp>In-system_programming|ISP]] układów AVR, który to posiada między innymi możliwość zmiany zawartości pamięci Flash (programu).
Idea
Obecnie popularne programatory posiadają następujące wady:
- Są stosunkowo drogie - Najtańszy oficialny programator AVR Dragon to wydatek rzędu ∼250 PLN (2010)
- Są skomplikowane - wiele programatorów posiada np. bufory konieczne do programowania układów pracujących przy napięciach zasilania innych niż 5V
Wymagają niepodpisanych sterowników (problemy w 64 Windowsie)(Edit: Najnowsze wydania USBLib nie posiadają tego problemu) Oraz co najgorsze:- Wymagają innego programatora do uruchomienia!
Kod programatora opiera się na projekcie wchodzącym w skład pakietu LUFA((Lightweight USB Framework for AVRs by Dean Camera)): https://web.archive.org/web/20241108081242/http://www.fourwalledcubicle.com/AVRISP.php Natomiast płytka została zaprojektowana przeze mnie.
Zalety tego programatora
- Dzięki wbudowanemu [[bootloaderowi]] USB nie jest konieczne posiadanie innego programatora w celu jego uruchomienia.
- Umożliwia zasilenie układu docelowego
- Zastosowanie elementów [[SMD]] eliminuje konieczność wiercenia (chyba najbardziej uciążliwy proces podczas wytwarzania płytek).
- Tylko 4 elementy wymagają odpowiedniej polaryzacji + mikrokontroler (trudniej o pomyłkę).
- Pracuje z avrdude lub z AVR Studio (w zależności od wybranego firmware)
- Niski koszt (20÷25 PLN październik 2011)
- Małe wymiary
- Posiada generator 4MHz (do ratowania zablokowanych układów przez złe ustawienie fusebitów źródła taktowania)
- Programuje układy korzystające z interfejsów [[ISP]], PDI, TPI (Układy AVR32 i xMega)
- Prawdziwe USB (nie przekombinowane jak w przypadku np. USBASP)
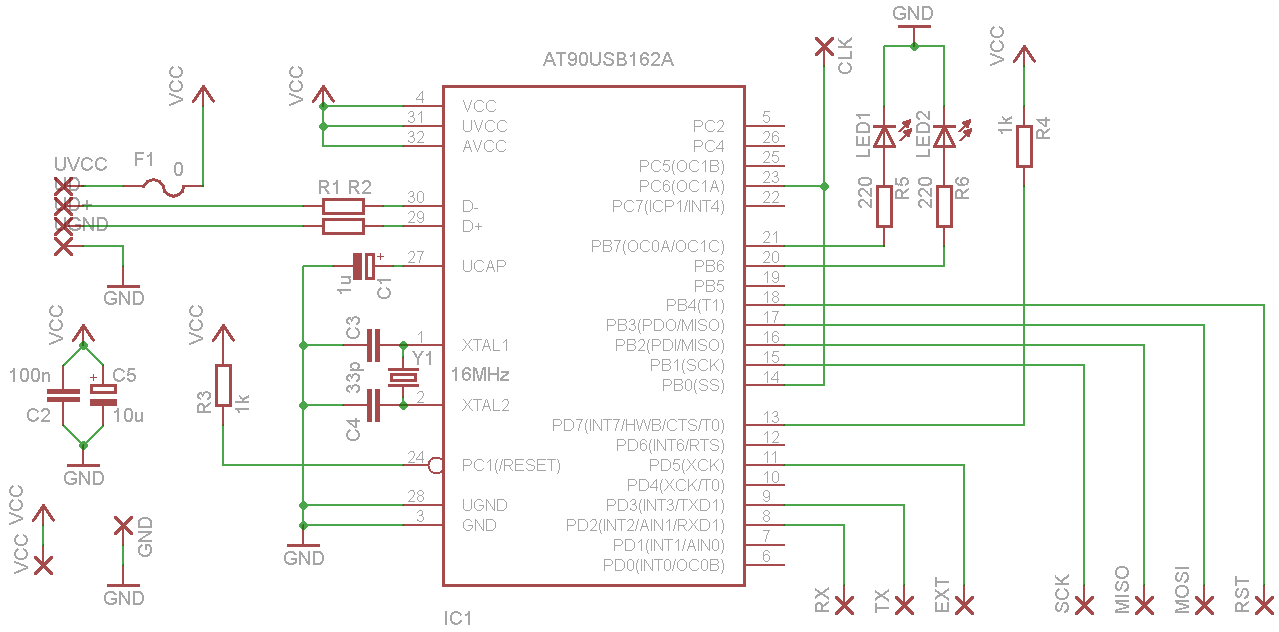
Schematy
Lista elementów
| Element | Wartość | Opis |
|---|---|---|
| IC1 | AT90USB162 | Mikrokontroler |
| USB | - | Pola lutownicze do podłączenia przewodu USB |
| F1 | 500 [mA] | Bezpiecznik polimerowy |
| R1 R2 | 22 [Ω] | Rezystory linii USB |
| C1 | 1 [uF] | Kondensator stabilizatora napięcia 3V3 ((Dla modułu USB układu)) |
| C3 C4 | 33 [pF] | Kondensatory oscylatora |
| Y1 | 16 [MHz] | Oscylator kwarcowy |
| C2 | 100 [nF] | Kondensator szyny zasilania |
| C5 | 10 [uF] | Kondensator szyny zasilania |
| R3 | 1 [kΩ] | Rezystor ustalający stan nieaktywny (wysoki) na sygnale reset uC |
| R4 | 1 [kΩ] | Rezystor ustalający stan nieaktywny (wysoki) na sygnale hardware bootloader uC |
| R5 R6 | x [kΩ] | Rezystory ograniczające prądy w diodach sygnalizacyjnych |
| LED1 LED2 | Diody sygnalizacyjne | |
| Złącza szpilkowe typu goldpin |
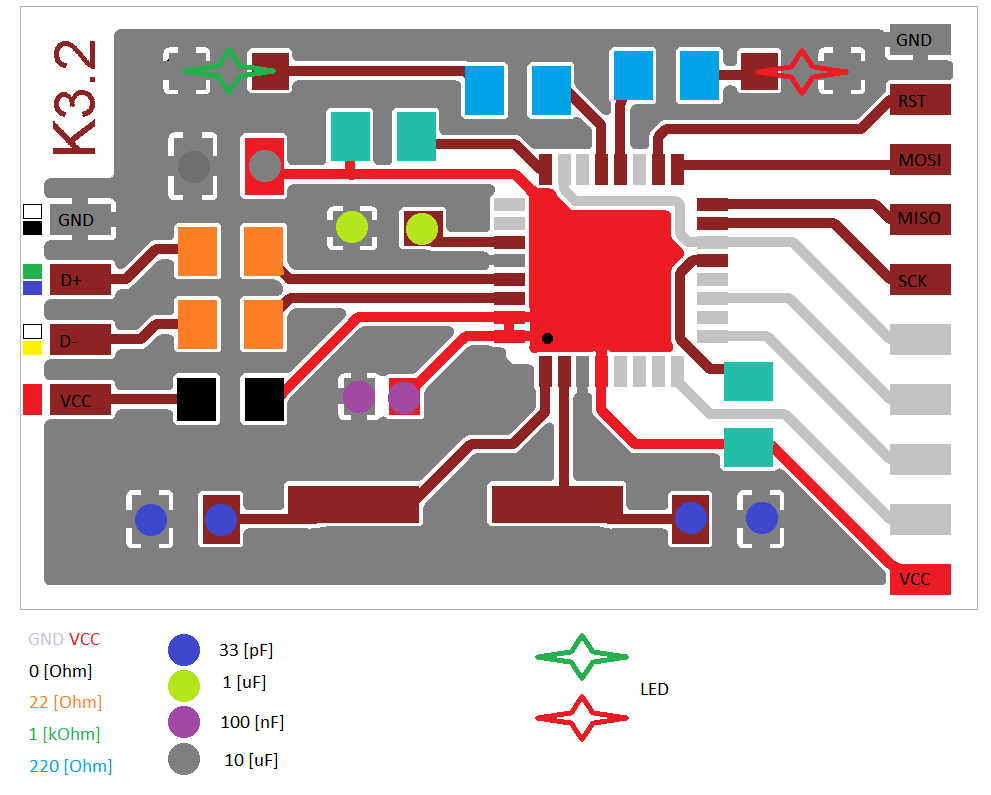
Wykonanie
- Laminat należy przyciąć do odpowiednich wymiarów
- Krawędzie laminatu należy zaokrąglić za pomocą pilnika do metalu lub papieru ściernego
- Laminat należy dokładnie oczyścić z zabrudzeń
- Na laminat należy przenieść obraz ścieżek układu dowolną metodą
- Laminat należy wytrawić
- Obraz ścieżek należy zmyć
- Wszystkie ścieżki należy sprawdzić pod kątem przerw i zwarć z pobliskimi ścieżkami
- Płytkę należy zabezpieczyć roztworem kalafonii
- Pobielamy pady układu scalonego
- Jako pierwszy montujemy układ scalony, po dokładnym spozycjonowaniu i sprawdzeniu poprawności pozycji. Przylutowywujemy dwa naprzeciw położone wyprowadzenia cały czas przytrzymując układ. Po unieruchomieniu układu przylutowywujemy pozostałe wyprowadzenia.
- Sprawdzamy każde wyprowadzenie układu pod kątem zwarć i przerw
- Przylutowywujemy kolejne elementy zaczynając od najmniejszych.
- Diody oraz kondensatory tantalowe muszą być odpowiednio spolaryzowane.
- Przylutowywujemy przewody USB
- Przewody przylutowywujemy do pól lutowniczych (:!: w złączu linie MOSI i MISO muszą być zkrosowane!)
Uruchomienie
Sprawdzenie poprawności działania i troubleshooting
- Sprawdzamy polaryzację kondensatorów
- Sprawdzamy poprawność połączeń
- Sprawdzamy czy nie ma zwarcia pomiędzy masą a szyną zasilania
- Sprawdzamy czy kryształ jest połączony z uC i czy nie ma zwarć
- Sprawdzamy czy nie ma zimnych lutów (matowe połączenie zamiast błyszczącego)
- Podłączamy urządzenie do komputera
- Sprawdzamy napięcie na kondensatorach tantalowych: na większym powinno wynosić 5±0.5 [V] na mniejszym (regulator 3V3 dla szyny danych USB) 3.3±5 [V]
- Sprawdzamy czy linie MOSI i MISO są skrosowane
Oprogramowanie
- Ściągamy potrzebne narzędzia:
- Najnowsze libUSB-win
- Najnowszy pakiet LUFA (wymaga modyfikacji)
- Narzędzie Atmel FLIP lub [[http://dfu-programmer.sourceforge.net/|DFU-programmer]] pod Linuksem
- (Dodatkowo) USBView
Osoby korzystające z Linuksa powinny pobrać odpowiednie dla siebie narzędzia i odpowiednio dostosować następujące kroki.
Kod z pakietu LUFA wymaga modyfikacji: pin PB4 musi być w czasie pracy nieaktywny. Najnowszy kod posiada błąd uniemożliwiający poprawną prace (reset aktywny stanem wysokim)
-
Sprawdzony układ podłączamy do komputera, za pomocą menedżera urządzeń lub programu USBView powinniśmy zaobserwować pojawienie się nowego urządzenia. (Pod Linuksem można użyć narzędzia lsusb)
-
Instalujemy sterowniki które znajdują się w katalogu instalacyjnym narzędzia Atmel FLIP.
-
Jeżeli skompilowaliśmy program samodzielnie, do zaprogramowania układu możemy wykorzystać makro znajdujące się w pliku makefile. Jeżeli wgrywamy prekompilowany program należy:
- uruchomić narzędzie Atmel FLIP
- wybrać opcje z menu głównego: Device->Select...->AT90USB162->OK
- wybrać opcje z menu głównego: Settings->Communication->USB
- w momencie pojawienia się okna USB Port Connection wybieramy opcje Open
- wybrać opcje z menu głównego: File->Load HEX File... i otworzyć odpowiedni plik
- w zakładce Operations Flow klikamy przycisk Run
- zamykamy narzędzie Atmel FLIP
-
Resetujemy urządzenie poprzez ponowne podłączenie do portu USB. W śród urządzeń USB powinno się pojawić nowe urządzenie, sterowniki instalujemy z katalogu instalacji libUSB-win.
-
Jeżeli nasz system nie chce uruchomić niepodpisanego sterownika musimy jeszcze wygenerować odpowiednie pliki INF za pomocą narzędzia inf-wizard należącego do pakietu libUSB-win.
Możliwe problemy
- Jeżeli na komputerze zainstalowano AVRStudio to w systemie będą zainstalowane sterowniki Jungo WinDriver, urządzenie nie będzie działało poprawnie dopóki nie zostanie zainstalowany sterownik libUSB. Pomoc
Korzystanie z programatora
Jeżeli programujemy za pomocą avrdude należy korzystać z następującego schematu:
avrdude -pXX -cavrispmkii -P usb gdzie pod XXX wstawiamy nazwę układu do programowania (np. -pm8 dla ATmega8). Użytecznym argumentem linii poleceń jest -B 4 który ustala okres trwania sygnału taktującego (w tym przypadku 4 [us]: 250 [kHz] )
Aktualizacja oprogramowania
Kiedy kupujemy MCU ma on wgrany jedynie bootloader znajdujący się na końcu pamięci programu. Po resecie PC((program counter)) "przelatuje" przez całą pamięć (wypełnioną rozkazem NOP((NO Opearation)) ) aż trafia na program bootloadera. Po wgraniu oprogramowania MCU, bootloader nie jest automatycznie aktywowany. Można jednak wymusić uruchomienie bootloadera już po wgraniu programu. Należy:
- Podciągnąć linię HWB((HardWare Boot)) do minusa [1]
- Zresetować układ poprzez linię reset [2] (tutaj wystarczy ułamek sekundy zwarcia z masą, ale linia HWB musi być w tym czasie również zwarta) Aby to zrobić należy zewrzeć następujące punkty do masy (układ ma być podłączony do komputera).
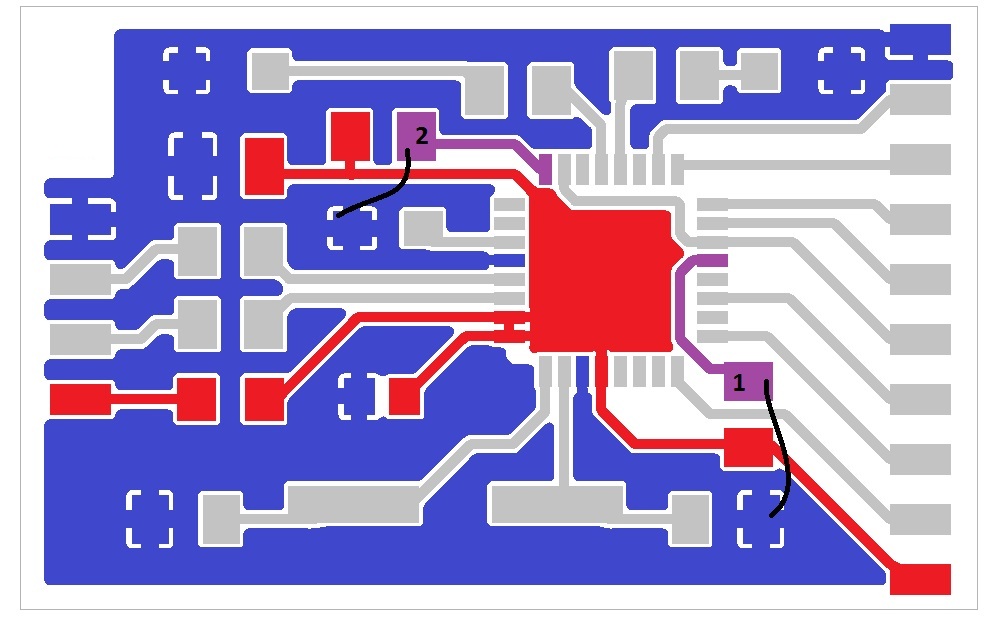
TICK Do zwarcia linii z masą konieczne jest metalowe narzędzie. Jedna z ścieżek może zostać zwarta za pomocą czarnego przewodu wyprowadzonego z płytki.
Należy zwrócić szczególną ostrożność podczas procedury, można spowodować zwarcie linii zasilania komputera. Kolorem czerwonym oznaczyłem ścieżki szyny zasilania, niebieskim masę a fioletowym ścieżki do zwarcia z masą.
Pliki
- Schematy - Eagle, now owned by Autodesk
- Aktualny wsad do procesora Maj 2012